
About
Geometry - Line in linear algebra.
Line and line segment definition in Linear Algebra that goes:
A line has a dimension of one because only one coordinate is needed to specify a point on it
Articles Related
Line vs Line Segment
A line segment has a scalar <math>\alpha</math> that ranges over a finite set of real number whereas a line has a scalar that ranges over all real numbers.
The below definitions applied to a line and to a line segment by changing the scalar range.
Through the origin
One-dimensional
The line through the origin and the vector v (the point v) is the set of points where the scalar <math>\alpha</math> ranges over all real numbers:
<math>\{\alpha. v : \alpha \in \mathbb{R}, 0 <= \alpha <= 1\}</math>
where:
- v is a vector
- <math>\alpha</math> is a Number System - Real Number (Scalar) -
forms the line through the origin and the vector v (ie the point)
The points of a line that does contain the origin, form a vector space
Three-dimensional
# Line in three dimension
{[x, y, z] : a * [x, y, z] = 0, b * [x, y, z] = 0}
Not through the origin
Definition of a line that goes through the vector u and v (where u and v are not the origin)
Translation and Scalar multiplication Formulation
Vector Translation and vector scalar multiplication are used to defined set of points forming an line segment (because the scalar <math>\alpha</math> ranges not in <math>\mathbb{R}</math> and is then in a finite set) that not necessarily go through the origin.
You translate the line by adding a vector c [0.5, 1] to every point of the line segment from [0, 0] to [3, 2].
<math>\{[0.5, 1] + \alpha [3, 2] : 0 <= \alpha <= 1\}</math>
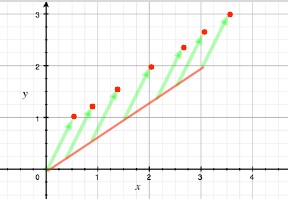
The result is a line through c instead of through origin.
Symmetric Formulation (Affine,Convex)
A new formulation which is symmetric with respect to endpoints (ie you have a coefficient on [3, 2] and on [0.5, 1]) is:
<math>\{\alpha [3.5, 3] + \beta [0.5, 1] : (\alpha, \beta) \in \mathbb{R}, (\alpha, \beta) >= 0, \alpha + \beta = 1\}</math>
You get it by using distributivity: <math>\alpha(u+v)=\alpha.u+\alpha.v</math>
| alpha
[3,2]+[0.5,1] | = alpha
([3.5,1]-[0.5,1])+[0.5,1] [3.5,1]+(1- alpha
)[0.5,1] [3.5,1]+ beta[0.5,1] |
This formulation describes the line that goes through the point [3.5, 3] and [0.5, 1].
More generally, the line through the vector u and v consists of the set of a affine combinations of u and v:
<MATH>\{\alpha{u} + \beta{v}: (\alpha, \beta) \in \mathbb{R}, \alpha + \beta = 1\}</MATH>
Combination
To resume:
- a finite Line Segment can be described by a convex linear combination
- an infinite line Segment (a line) can be described by a affine linear combination
Convex
A convex combination represents a Finite Line Segment.
An expression with two vectors of the form:
<math>\{\alpha.u + \beta.v : (\alpha, \beta) \in \mathbb{R}, (\alpha, \beta) >= 0, \alpha + \beta = 1\}</math>
is called a convex combination of u and v.
The u-to-v line segment consists of the set of convex combinations of u and v.
Affine
Infinite line Segment
delim{lbrace}{alpha u + beta v : alpha in bbR, beta in bbR, alpha + beta = 1}{rbrace}An expression of the form
alphau +
betawhere
alpha + beta = 1is called an a affine combination of u and v.
The line through u and v consists of the set of affine combinations of u and v